Reading List
The most recent articles from a list of feeds I subscribe to.
Borrowing Library Books for Your Kindle
Basically, do it. It's super easy. I'll show you how in this post.
How to borrow library books for your Kindle
- Obtain a Kindle from Amazon. I'm using the Kindle Paperwhite with Special Offers, which I recommend. The special offers are just ads for random books, and they only appear on the lock screen of the Kindle. Who knows? You might even find something you like with the offers.
- Obtain a library card number from your local library. This takes a few minutes in person, but I'm sure you can also do it online. You'll probably need some proof of residence, like a driver's license or some utility bill. Better be safe and bring both.
- Sign into your library's ebook manager on the library's website using your library card number. Most likely they are using a service called Overdrive. You'll probably also create a PIN number when you register for your library card, so write that down somewhere!
- Search for a book on Overdrive (or your library's respective ebook service), and then you'll be able to either borrow or place a hold for it. The San Francisco Public library, for example, allows you to borrow or place holds for up to something like 20 books at a time!
- Once you've borrowed a book, click Read Now with Kindle. You'll been taken to the Amazon page for the book, and you can send the ebook directly to your Kindle. Next time your Kindle connects to wifi, the borrowed book will be downloaded.
- Read, rinse, and repeat. I like to have several books borrowed at a time, with a few holds as well, so that there's always something coming down the pipe.
🎁 Placing holds for books is like sending a gift to your future self
Imagine waking up to this email:
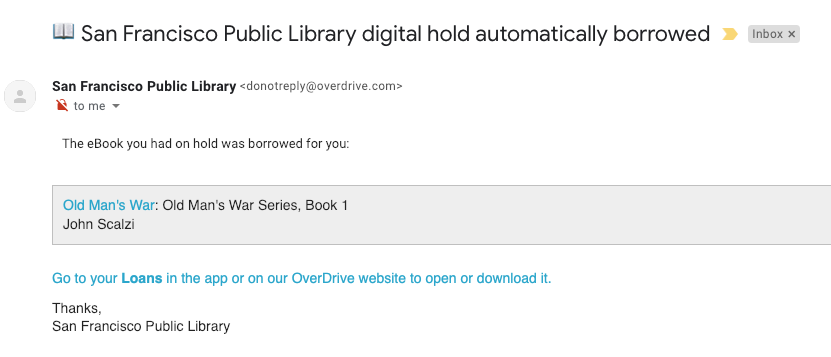
It's like Christmas morning! Once you click that link, you'll be taken to your Overdrive account:
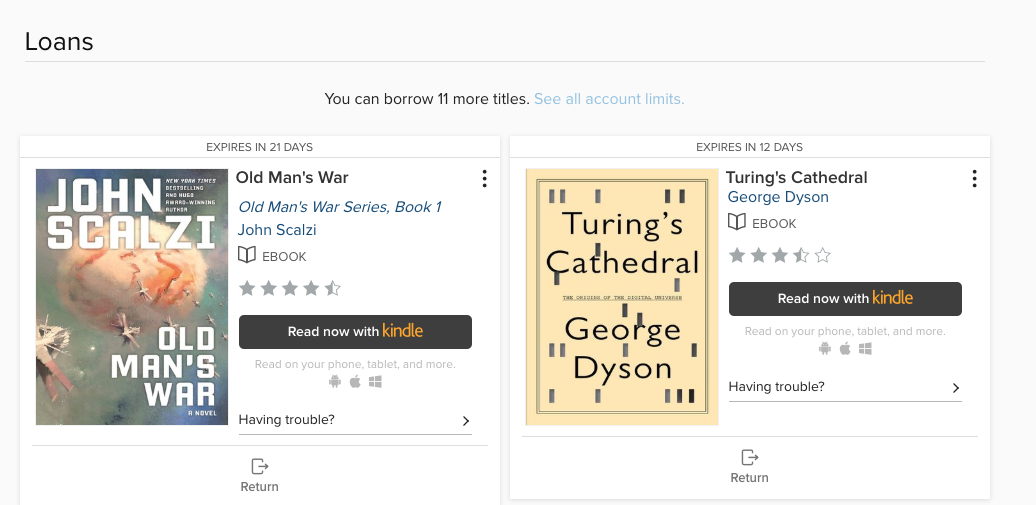
Even before you've had your (first) coffee of the day, you can probably manage to click that Read Now with Kindle button:
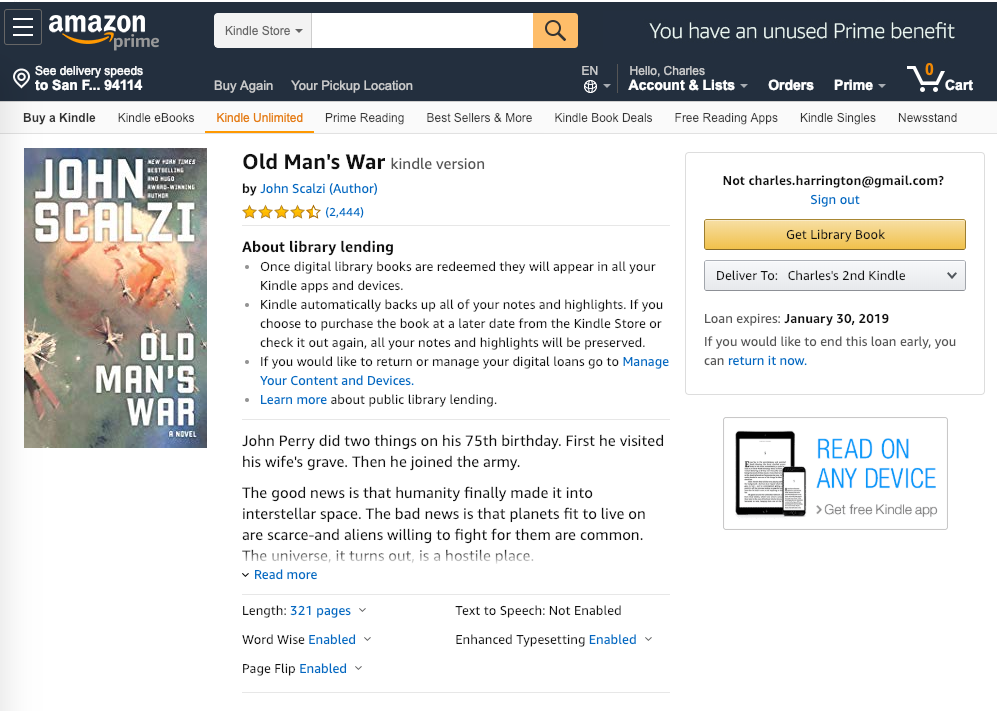
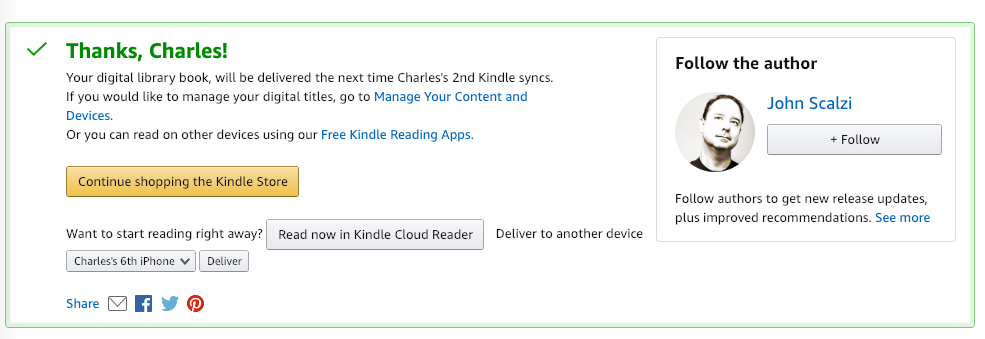
Click Get Library Book, and you're done! Your morning commute just got a little bit nerdier.
Borrowing Audiobooks
You can do this, too!
There's a great app called Libby that is somehow affiliated with Overdrive, and that's what I recommend using for listening to library audiobooks. Everything that you rent through Overdrive, whether ebook or audiobook, will automatically appear in your Libby app (once you sign into Libby with your library card). This is helpful for when you inevitably forget your Kindle at home (there's also a Kindle phone app, but I haven't used it recently).
I still haven't entirely embraced the audiobook lifestyle, but it's something on my mind for 2019.
But what about how good paper books smell?
I'm a paper book monster. And, yes, the smell is half the reason. But public libraries are vitally important -- and were vitally important to my childhood. I'm happy to be bringing them back into my adult life, even in this electronic way.
I'm also still buying an insane amount of paper books, from local booksellers whenever possible. Not even Marie Kondo can stop me from that.
The Walkingman Collection
Dec 2021 Update: I've migrated this site to syte, and the previous (flaky!) Instagram integration is now gone. Hopefully I'll figure out a nice solution for displaying these photos in the future. Thanks! -- The Webmaster
I've pulled all my Instagram #walkingman photos into a handy little page. Check it out.
So long as the Instagram API continues to play nice (no guarantees), then this page will stay up-to-date as my travels continue.
I'd love to learn more about who designs each of these little creatures for a given city or country. What's the decision process like? Are they meant to capture the spirit of the people in some way?
This is a coffee table book waiting to happen.
Humans of Machine Learning
I've started an interview series on the FloydHub blog called "Humans of Machine Learning." I'm hoping to talk with lots of real human beings who are doing fun, creative, interesting, and / or surprising things with machine learning and AI. Those things might be weekend projects, work projects, or school projects -- doesn't matter, just something that people are excited to talk about and share with the community. I'm eager to learn from them and be inspired by their creativity, focus, and ideas. Another tangential goal of mine is to get better at interviewing people.
So far, I've chatted with Leanne Luce about her experiments with AI and fashion blogging, and Kalai Ramea about computational creativity. A few more conversations are already in the pipeline. If you're doing something creative with machine learning, please reach out on Twitter (@whatrocks).
You can also find the interviews at humansofml.com.
Penpals
Here's a new Terminal Man track from my most recent flight to Newark. I've been watching a lot of Stranger Things, if you can't already tell.
This is the first Terminal Man song I've hosted on YouTube instead of SoundCloud. Slightly annoying to have to make a movie out of the mp3 before uploading, but I do like my iMovie Star Wars crawl thing going on here. And I feel more confident that dropping stuff onto YouTube is like putting it into an Indiana Jones-style vault or time capsule that won't ever go away or shut down.
Using NLP to Write Graduation Speeches
I've always been a little bit obsessed with graduation speeches. Put simply, I like being reminded of the great possibility and great responsibility of living.
But as it's going to be a while until May rolls around again, I decided to try my hand at generating my own graduation speeches using some basic data science techniques.
I'm happy to report that after a little bit of NLP using Markov chains (and a whole lot of data-scraping and data-cleaning), I was able to bring forth to the world this inspiring sentence:
They listened to someone who makes nothing but flaming hot Cheetos.
If you're interested in reading more about the specifics of my project, I wrote about it in detail on the FloydHub blog, or you can try it out now:

Click this button to open a Workspace on FloydHub where you can generate your own "commencement speech style" sentences in a live JupyterLab environment that we call a Workspace.
The commencement address dataset of ~300 famous speeches (that I painstakingly assembled) will be automatically attached and available in the Workspace.
The speech_maker notebook has three sections for you to try, where you'll generate commencement-speech sentences:
- Using the entire dataset
- Filtering to only the top ten schools by count of speeches given
- Filtering to one school at a time using a Jupyter widget extension
Where can I read actual good speeches?
Right here. I put together this simple Gatsby.js static site with the raw text (and some YouTube links) of the speeches in my dataset. PRs are open for the dataset if anyone's interested in contributing. Right now, the best we have is the NPR "Best of" commencement speech website, which hasn't been updated since 2015. It would be great to find a way to make a new home for great speeches on the web.